
We study a dynamic model of the relationship between two people where the states depend on the “power” in the relationship. We perform a comprehensive analysis of stability of the system, and determine a set of conditions under which stable relationships are possible. In particular, stable relationships can occur if both people are dominant, but the sum of dominances is below a bound determined by the model’s parameters. Stable relationships can also occur if one person is dominant and the other is submissive, provided the level of dominance exceeds the level of submissiveness but not beyond a threshold. We also conclude that a stable relationship is not possible if both people are submissive. While our model is motivated by a social or romantic relationship, it can also be applied to professional or business relationships, diplomatic relationships between nations, and certain biological interactions between organisms and between automated agents or robots.
Stable Relationships
June 29, 2024
August 17, 2024
September 04, 2024
September 07, 2024
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
Abstract
1. Introduction
We study a dynamic model of the relationship between two people, and . The amount that they each “like” each other depends on the amount they liked each other at the previous timestep as well as the “power” in the relationship. Let denote the amount that likes at time , and the amount that likes . Let denote the power of player at time (− denotes the power of player ).
We assume that , and that either or (if then neither player's value depends on the power and the model is trivial). In general we can assume that , and can substitute in , without affecting our analysis. This will reduce the number of parameters and simplify the model. However, we will choose to keep in the model, as the model is not very complex and this permits a more intuitive interpretation of the parameters. We will also assume that , since in that case the system will continue to remain at the starting value.
We can substitute into the other expressions to obtain the following system:
Proposition 1. is an equilibrium point of the system defined by Equation 1 if and only if
Proof. In an equilibrium, we have that
Since ,
Similarly, we have
In order to ascertain the stability of the system, we calculate the eigenvalues of the matrix corresponding to the system defined by Equation 1:
The eigenvalues are
The corresponding eigenvectors are
The central concept in analysis of dynamic systems is that of stability [1]. A system is stable if , where is the eigenvalue with largest absolute value. If a system is stable, then the dynamics will converge to an equilibrium point. If , then the system is unstable, and will diverge to If , then the system is marginally stable. Marginal stability is often associated with being a middle ground between these two extremes: “A marginal system, sometimes referred to as having neutral stability, is between these two types [asymptotically stable and unstable]: when displaced, it does not return to near a common steady state, nor does it go away from where it started without limit” [2]. It turns out that a marginally stable system can actually exhibit a wide range of behavior such as oscillating between several points, but also converging to an equilibrium (as stable systems) and diverging to infinity (as an unstable system). Essentially, if a system is marginally stable this means that further investigation is needed to determine asymptotic behavior.
2. Stability characterization
Since , the system is either marginally stable or unstable depending on whether If , then the system is unstable, and if it is marginally stable.
Proposition 2. The system is marginally stable if and only if
Proof. if and only if
if and only if
So the system is marginally stable if and only if
Note that means that player prefers more power, and means that prefers more power. Say that a player is dominant if they prefer more power, and submissive if they prefer less power. The dominance of is , and the submissiveness of is ; similarly, the dominance of is , and the submissiveness of is
We now analyze the implications of Proposition 2 on the different cases of dominance/submissiveness for the players.
- Both and are dominant:
We have , , and furthermore:
This is equivalent to the constraint that the sum of the dominances is at most
- Both and are submissive: We have , :
This can only hold if , which is excluded by assumption in our model.
- is dominant and is submissive: We have , :
This means that cannot be more submissive than is dominant, and cannot be more dominant than 's submissiveness plus
- is dominant and is submissive: We have , :
This means that cannot be more submissive than is dominant, and cannot be more dominant than 's submissiveness plus
In summary, we can achieve a marginally stable system in which both players are dominant, with the sum of dominance bounded by We can never reach a situation where both players are submissive. We can also reach situations in which is more (or equally) dominant than is submissive by at most , and situations where is more (or equally) dominant than is submissive by at most
3. Further analysis of marginally stable behavior
The eigendecomposition of transition matrix is , where
We have that
Asymptotic behavior of the system is determined by
- :
At first glance the system is stable, since we have that However, in this case the matrix is not actually diagonalizable (the matrix is not invertible), so we cannot draw any conclusions based on the eigendecomposition. In Proposition 3, we show that the system is actually unstable.
- :
We have
So we have that
So the system is stable and converges to the equilibrium point with
- :
For even, we have
So ,
For odd, we have
So
So the system will oscillate between two points:
If , then the system trivially just stays at the initial point since it is an equilibrium. Otherwise, the system will oscillate between and , neither of which are equilibrium points. However, the average of and is an equilibrium point:
Proposition 3. If , then the system is unstable.
Proof. Note that the transition matrix is
Since this matrix is not diagonalizable, we cannot construct the eigendecomposition. However, we can compute by instead using the Jordan decomposition. We have where
By Lemma 1,
We can see that the system is clearly unstable (for ), with
Lemma 1. For all ,
Proof. The statement clearly holds for Suppose it holds for for some
4. Further analysis of unstable behavior
We have seen several scenarios under which the system is unstable. In this section we explore the asymptotic behavior of these scenarios.
- :
Note that in this case we have , so by assumption we do not have So The asymptotic behavior depends on the sign of and on the sign of the difference in initial states If and , or if and , then the system will diverge to Otherwise, the system diverges to Thus, the system diverges to if the dominant player has a lower initial state value, and diverges to if the dominant player has a higher initial state value.
- , , :
Recall the formula for from Equation 2. We have:
Note that implies that So the denominator is negative. So therefore,
This implies that:
If and have different signs, then the system will diverge to or depending on the sign of If and are both negative, then the system will diverge to or depending on the sign of Note that and cannot both be positive in this situation since We are also excluding the case that or
- , :
We must have . We have:
This implies that:
So the system will diverge to or depending on the sign of
- , :
By analogous reasoning to the previous case, we have:
So the system will diverge to or depending on the sign of
- , , :
From Equation 2, we see that the behavior will alternate between and for both players depending on the parity of . For even :
For odd :
If both and are positive, then the system will alternate between and . If one of them is positive and the other is negative, the system will alternate between and . Note that we can not have both and negative under this case, since implies that
- , :
We must have . For even :
For odd :
So the system will alternate between and
- , :
By analogous reasoning to case 6, the system will alternate between and
5. Conclusions
We have seen that the system can exhibit a wide range of behavior depending on the value of as well as the signs of , , and While analysis of the eigenvalues shows that the system is either marginally stable or unstable, this does not tell the full story. Within the set of marginally stable scenarios we have shown that the system can be stable, unstable, or oscillatory. In particular, we show that stable relationships are possible under our dynamics under certain sets of conditions. The first is that both people are dominant, but not too dominant. They do not need to be equally dominant, but the sum of the dominances must be strictly below The second is that one person is dominant and the other is submissive, and the dominance of the dominant person strictly exceeds the submissiveness of the submissive person by less than Note that the magnitudes of the dominance and submissiveness must be similar, but both can be very small or large in absolute terms. Finally, if the sum of the dominances exactly equals , then the system will oscillate between two points whose average is an equilibrium.
Interestingly, while it is possible to have a stable relationship between two people who are both dominant, it is not possible if they are both submissive. It is necessary that at least one person is dominant, and that the amount of dominance outweighs the amount of submissiveness of the other. Relationships that do not satisfy the conditions described in the preceding paragraph are unstable, and the state of at least one person will diverge to One special case is if the sum of the dominances is exactly zero. This situation may appear to be a “perfect match”, where one player is exactly as dominant as the other is submissive. We have shown that in this situation the system will diverge either to or , depending on the initial conditions. The case actually seems to represent “too perfect” of a match.
We have also seen that the system can diverge in various ways, including both players going to , both going to , one going to and the other going to , and both alternating between and In general the system is not robust to changes in the initial conditions. If exceeds by a small amount ϵ, the system may behave drastically differently than if exceeds by ϵ.
While our model is motivated by social or romantic relationships, it can also be applied to professional or business relationships as well as diplomatic relationships between nations. In all of these settings it is natural to assume that one party will obtain more “power” if the other “likes” or is reliant on them more. The model could also apply to certain biological interactions between organisms and between automated agents or robots.
6. Related research
Felmlee and Greenberg [3] consider a model described by the following system of differential equations. In the system, denotes the goals, preferences, or ideals of the wife, and for the husband, while and refer to the frequency of some behavior of the wife and husband at time .
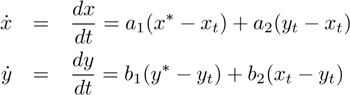
The second term in each equation resembles our system, though this model differs from ours in several ways. First, their model is continuous-time while ours is discrete. Their model also has 4 parameters, while ours has 3 (and only 2 if we normalize by assuming ). They conclude that the stability of the system depends on the values of the four parameters; however, they do not perform exhaustive analysis over all settings. Our analysis allows us to obtain clear intuition for precisely when relationships are stable.
Gottman et al. [4] consider the following general discrete model. and denote the wife and husband’s “behavior scores” at time . The model assumes a sequential structure in which the wife moves first and the husband can then condition his behavior on the wife's action at the current timestep. denotes the “influence” of the husband's state at time on the wife's state at time when the husband's current state equals Similarly denotes the influence of the wife's state at time on the husband's state at time when the wife's current state equals
The primary difference between their models and ours is the sequential assumption that the wife moves first at each round. Our model assumes that both players select their behavior simultaneously at each time step. If we ignore this distinction, then we can view their model as a generalization of ours where the woman plays the role of player , the husband plays the role of player , , , , , and Their analysis is for the general model and does not consider our specific instantiation of the influence functions.
An earlier system of differential equations that closely resembles our system was proposed by Strogatz [5]. In this system, denotes Romeo's love/hate for Juliet at time , and denotes Juliet's love/hate for Romeo at time .
Aside from the key difference that their model is continuous while ours is discrete, we can view their model as a generalization of ours where Romeo is player , Juliet is player , This article just proposes the model and does not conduct any stability analysis. Subsequent work has analyzed the system for the case for two “identically cautious lovers” (i.e., ), and has left several other special cases as exercises [6].
Prior work has also considered more complex models that incorporate additional factors in relationships such as external events, third parties, and delays. For example, in delay models it is assumed that the change in state at time may depend on states at some time where is a measure of the delay [7, 8]. Several extensions of the continuous-time linear systems have been studied by Rinaldi et al. [9], which include complexities such as incorporating nonlinearity, models for secure vs. insecure and unbiased vs. biased individuals, environmental stress, additional emotional dimensions, and love triangles.
While our model is quite simple, it appears to be the only discrete model that considers simultaneous behavior of the agents. We are able to provide a novel complete characterization of the behavior and stability under our model, and provide novel sets of conditions on the dominance and submissiveness under which stable relationships are possible. Since we have completely analyzed stability for all parameter values, it is unnecessary to consider numerical simulations as some prior works have done for more complex models.
Funding Information: This project received no funding.
Author Contributions: Not applicable.
Conflict of Interest: There are no conflicts of interest.
References
- David G. Luenberger. Introduction to Dynamic Systems: Theory, Models, and Applications. John Wiley & Sons, Inc., New York, NY, 1979.
- Wikipedia contributors. Marginal stability — Wikipedia, the free encyclopedia, 2021. [Online; accessed 12-June-2022].
- Diane H. Felmlee and David F. Greenberg. A dynamic systems model of dyadic interaction. The Journal of Mathematical Sociology, 23(3):155–180, 1999.[CrossRef]
- John M. Gottman, James D. Murray, Catherine C. Swanson, Rebecca Tyson, and Kristin R. Swanson. The Mathematics of Marriage: Dynamic Nonlinear Models. The MIT Press, 2005.
- Steven H. Strogatz. Love Affairs and Differential Equations. Mathematical Magazine, 61(1):35, 1988.[CrossRef]
- Steven H. Strogatz. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry and Engineering. CRC Press, 2015.
- Natalia Bielczyk, Urszula Forys, and Tadeusz Płatowski. Dynamical models of dyadic interactions´ with delay. The Journal of Mathematical Sociology, 37(4):223–249, 2013.[CrossRef]
- Akio Matsumoto and Ferenc Szidarovszky. A delay dynamic model of love affair with cautious partners. AIP Advances, 8(10):105309, 10 2018.[CrossRef]
- Sergio Rinaldi, Fabio Della Rossa, Fabio Dercole, Alessandra Gragnani, and Pietro Landi. Modeling Love Dynamics. World Scientific, 2015.[CrossRef]